工具套件
NVIDIA Isaac
NVIDIA Isaac是一個全面性的開發平台,主要是為機器人技術和自主系統設計而成。它結合了強大的軟硬體資源,主要在加速智慧機器人的開發和部署,無論是工業、自動駕駛還是消費應用領域。
NVIDIA Isaac的優勢
- 加速開發週期:透過提供預構建的元件和現實的模擬環境,Isaac減少了開發和測試機器人應用所需的時間和精力。這種快速原型製作過程使開發者能夠迅速且高效地迭代。
- 高保真模擬:平台使用先進的物理和渲染技術,以確保模擬環境與現實情況非常接近。這對於在部署到真實世界之前測試和驗證機器人系統至關重要。
- 整合全面AI和數據工具:Isaac無縫整合了NVIDIA廣泛的AI生態系統,包括數據生成和處理工具,從而提供了強大的AI訓練和部署能力。
- 廣泛的生態系統和社區支援:NVIDIA提供了廣泛的文檔、論壇和支援,幫助開發者有效利用Isaac。其社區和生態系統的支援促進了創新和協作。
Isaac的主要功能
1. Isaac Sim: 先進的機器人模擬
- NITROS加速運計算:Isaac ROS與NVIDIA的硬體加速整合,以提高 ROS 2應用的性能。這包括優化的處理管道和對先進AI模型的支援,大大提升了運算速度和效率。
- 豐富的傳感器和感知:Isaac ROS包含了對各種傳感器的廣泛支援,提供了視覺慣性里程計、3D場景重建和立體視覺等工具,確保機器人能夠準確地感知和與環境互動。
2. 開放的生態系統:基於ROS架構
Isaac Perceptor和Isaac Manipulator皆為Isaac ROS的參考工作流程該平台,使用者可透過使用平台加速計算、物理仿真和生成式AI,推動AI機器人技術的發展,幫助開發者更快地構建和部署自動化機器人。
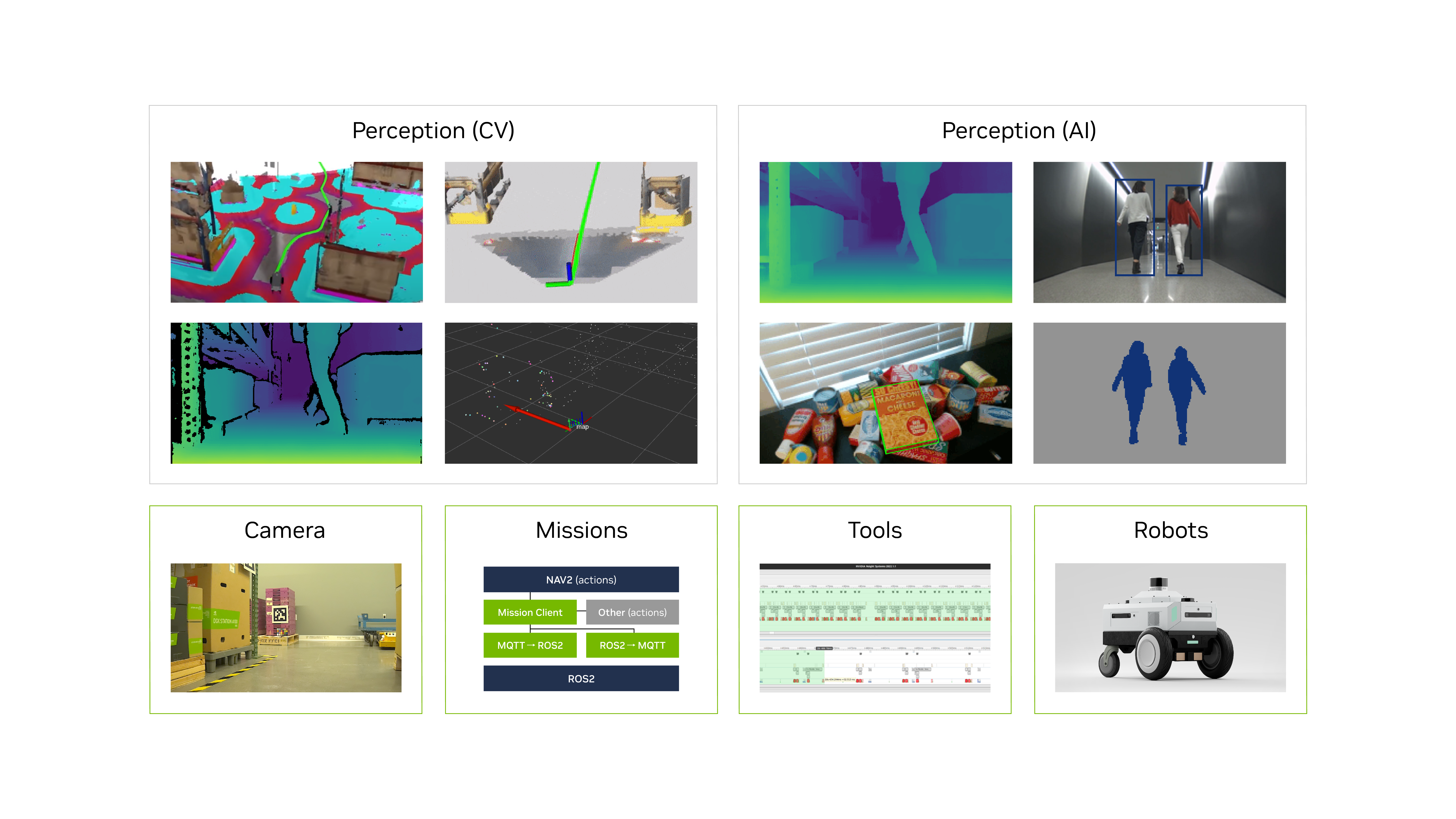
》Isaac Perceptor
Isaac Perceptor是一個基於Isaac ROS(Robot Operating System)的參考工作流程,專為開發自動化行動機器人(AMRs)而設計。它利用NVIDIA加速的程式庫和AI 模型,讓這些機器人在像倉庫或工廠這樣的未結構化環境中,能夠感知、定位並操作。其工作流程可支援多達八個同步攝像頭和慣性測量單元(IMUs),為AMR開發者提供了高度靈活的感知架構。其核心特點如下:
- AI深度感知:使用立體深度神經網絡(DNN)提供高密度且詳細的深度感知。
- 即時3D網格地圖:比傳統CPU方法快100倍,實現精確的障礙物檢測和映射地圖生成
- 加速的立體視覺里程計:提供最先進的即時定位結果,適合快速移動和變化環境中的 AMR。
》Isaac Manipulator
Isaac Manipulator 是另一個基於Isaac ROS的參考工作流程,專注於機械臂(操縱器)的開發。它利用NVIDIA加速的程式庫和AI模型,幫助開發者打造具備AI功能的機械臂,這些機械臂可以感知、理解並與其周圍環境互動。其核心特點如下:
- cuMotion路徑規劃 : 使用GPU加速的運動規劃器,可顯著降低操作周期時間,可用於 MoveIt 2開源運動規劃框架。
- FoundationPose : 一個新的統一基礎模型,能夠實現對新物體的6D姿勢估計和追踪,並且在不進行微調的情況下,依然能夠提供高精確度的結果。
- SyntheticaDETR : 基於DETR模型的單次圖像空間物體檢測,可以高效地預測所有物體的位置,並在合成和真實數據上進行訓練,以實現高精確度的物體檢測和追踪 。
3. Isaac Lab:機器人學習和AI訓練框架
- 強化學習和模仿學習:Isaac Lab是基於Isaac Sim的框架,簡化了機器人學習的工作流程。它支援強化學習、模仿學習和運動規劃,讓機器人能夠從模擬經驗中高效地學習。
- 在多GPU系統上的可擴展訓練:它使AI模型可以在多個GPU和節點上進行訓練,增強了生成豐富數據集的能力,加速了學習模型的收斂 。
